

前言:
前几天发布了一篇基于预测控制的CRM 无桥PFC的文章,昨天晚上我冒出了一点新点子,既然TCM控制方法用在PFC上可以很好很强大,那我一样也可以用在BOOST变换器上。大家都会说,CRM的BOOST功率做不大,输入和输出纹波电流太大了,是个硬伤。我想说如果我使用多相交错的方式来解决CRM BOOST的纹波问题,这拓扑能实现ZVS ZCS,实现了极高的效率。而且功率范围还可以扩展到数十千瓦级别,那么就只剩下控制复杂这个难点了。
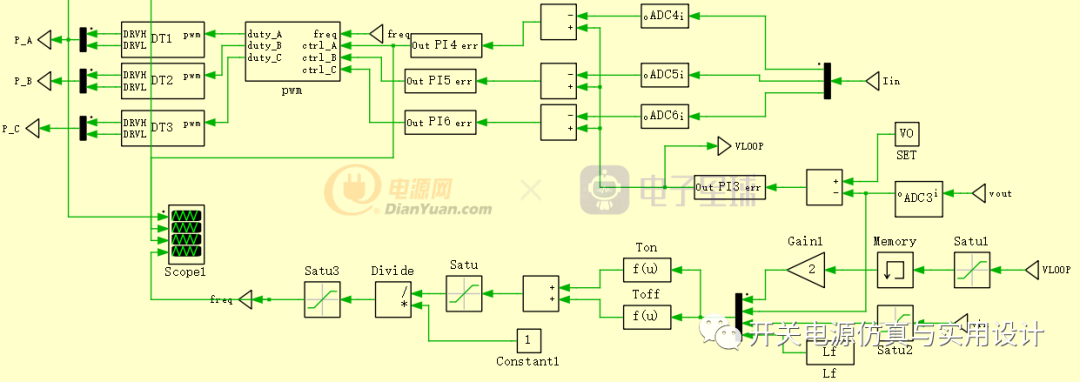
于是我基于上一篇文章中提到的实现方法,通过预测控制提前计算得到了实现ZVS ZCS的开关频率,通过启用多个ePWM模块的交错时基,就能在实际环境中实现CRM的变频控制。但是在仿真环境中如何实现多相BOOST的CRM控制,其实还是一个难题。其原因有是,多相交错BOOST的CRM控制需要多个固定交错角度的变频斜坡,再用控制器的输出去切这个斜坡产生PWM。由于在CRM模式工作时,开关频率只与当前的系统的输入输出条件存在关系,它是个是时变量。所以就不能通过滞后固定的时间来进行错相,当工作系统的工作区域发生改变时,就不能实现所需要的交错状态来达到降低电流纹波的目的。
既然这么麻烦,那有木有办法来实现呢?我曾经为了实现多相CRM的控制非常苦恼,主要就是不能很好的解决多个斜坡变频错相的问题(2016年的时候我与凌峰大大就这个CRM的问题进行过很多讨论)。但是昨天我想到了我为何不继续利用可复位积分器来实现固定相位的变频斜坡呢?
具体实现:比如A是主路斜坡,通过使用门电路的方法切割出33%,66%这个几个点。然后利用切割到的点去复位其它两个积分器,让另外两个积分器分别在原始斜坡的33%和66%点进行复位,然后开始从零发出斜坡。有了这个点子后,我澡都没洗完立刻去建模了。几分钟后就实现了,脑洞大开就那么一瞬间。这个实现你们就说妙不妙吧。模型可见下图所示:
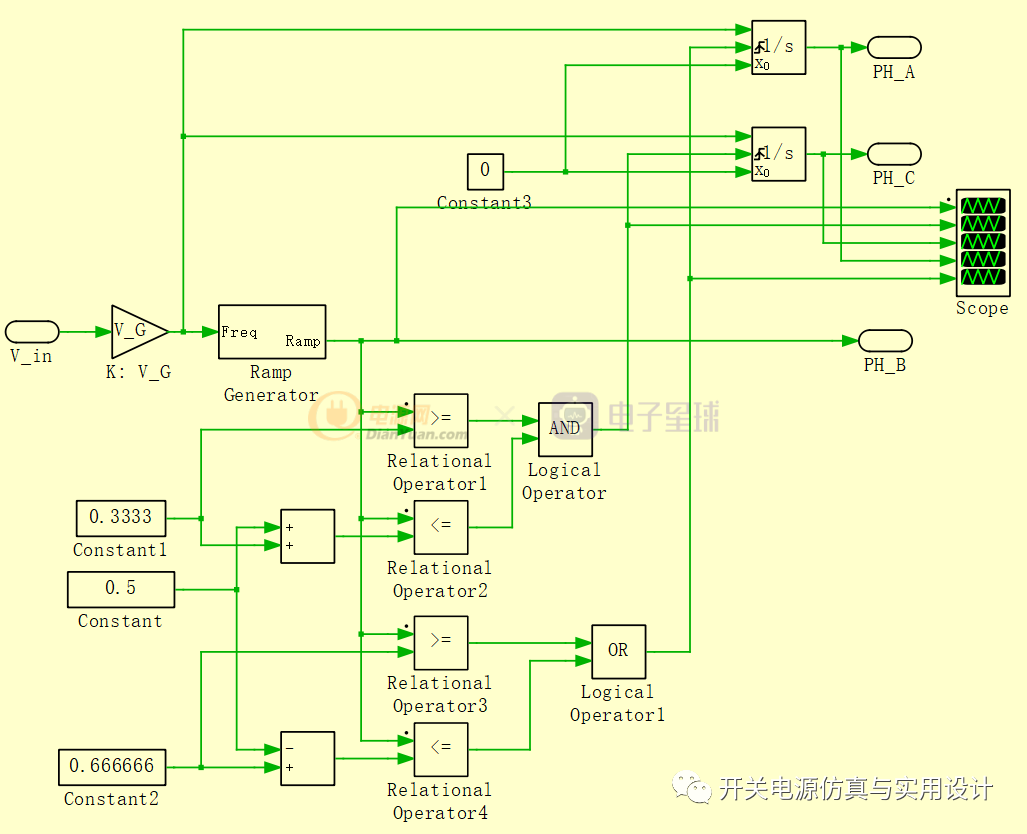

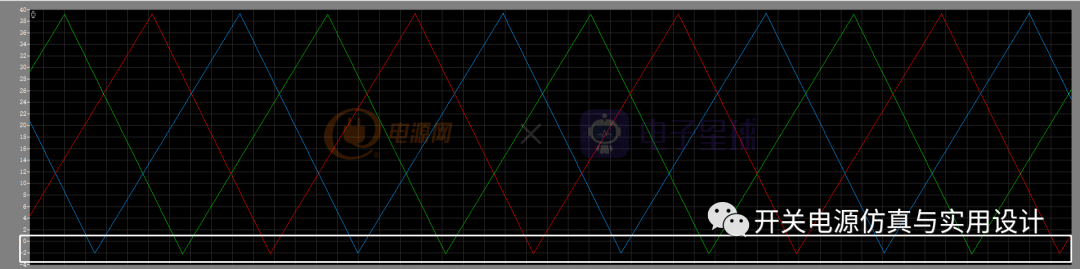
(三个变频错相的斜坡已经就绪)
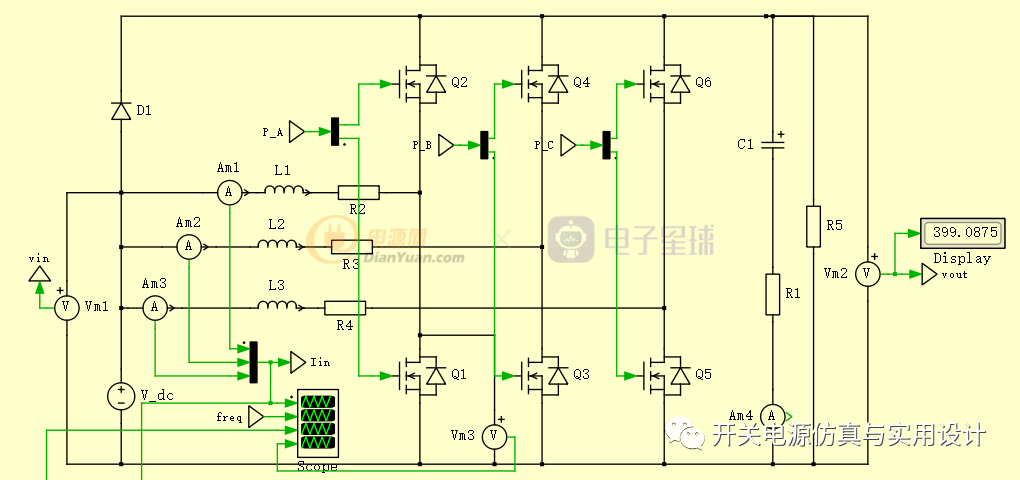
功率级是三错相CRM控制,各位根据所需的功率可以任意错相,其实现原理不再累述。我的目的实现BOOST的TCM控制,通过高端开关ON的时间来为低端开关实现ZVS。至于为什么是BOOST不是PFC,是因为在某些应用场景如果BOOST实现了ZVS ZCS,其好处也非常明显。听朋友说华为2007年就做了多相交错的CRM BOOST用在逆变器的前级,功率也挺大的。就放在目前的环境来说,宽禁带器件加上TCM实现ZVS ZCS,可以把系统的效率提的非常高,所以也是热门方向。
根据预测控制实现CRM控制的方法可见。
电感电流和开关频率:

通过对TOFF上增加扩展开通时间Tr,用来实现TCM控制,可见负向电流:
致谢:感谢Jizhe Wang博士,与我进行了大量了CRM , TCM控制的相关知识点讨论,让我受益匪浅,非常感谢。
小结:根据TCM控制思想,本文实现了多相CRM BOOST的控制,在实现ZVS ZCS的同时通过多相交错解决了输入和输出纹波电流的问题,扩展了功率范围,提升了拓扑的可用范围。